Building on prior work on puppet-style teleoperation devices, DIRECT prioritizes three principles for continuous data collection: mechanical durability, repeatability for consistent calibration across sessions, and ergonomics for operator comfort during extended use.
Durability via Servo Shields
Joint-space controllers mounting servos as load-bearing elements are highly vulnerable to failure. Relying solely on self-tapping screws driven into the plastic casings of the servo motors causes human-applied torque to eventually tear the screws out of the housing, requiring the whole motor to be replaced as a result. DIRECT resolves this via Servo Shields—enclosures that physically clamp the servo between solid barriers using supplementary mounting screws. By caging the actuator, structural loads are absorbed by the enclosure rather than the fragile internal threads, drastically improving mechanical durability. Any mechanical failures now occur exclusively on these inexpensive, easily reprinted shields.
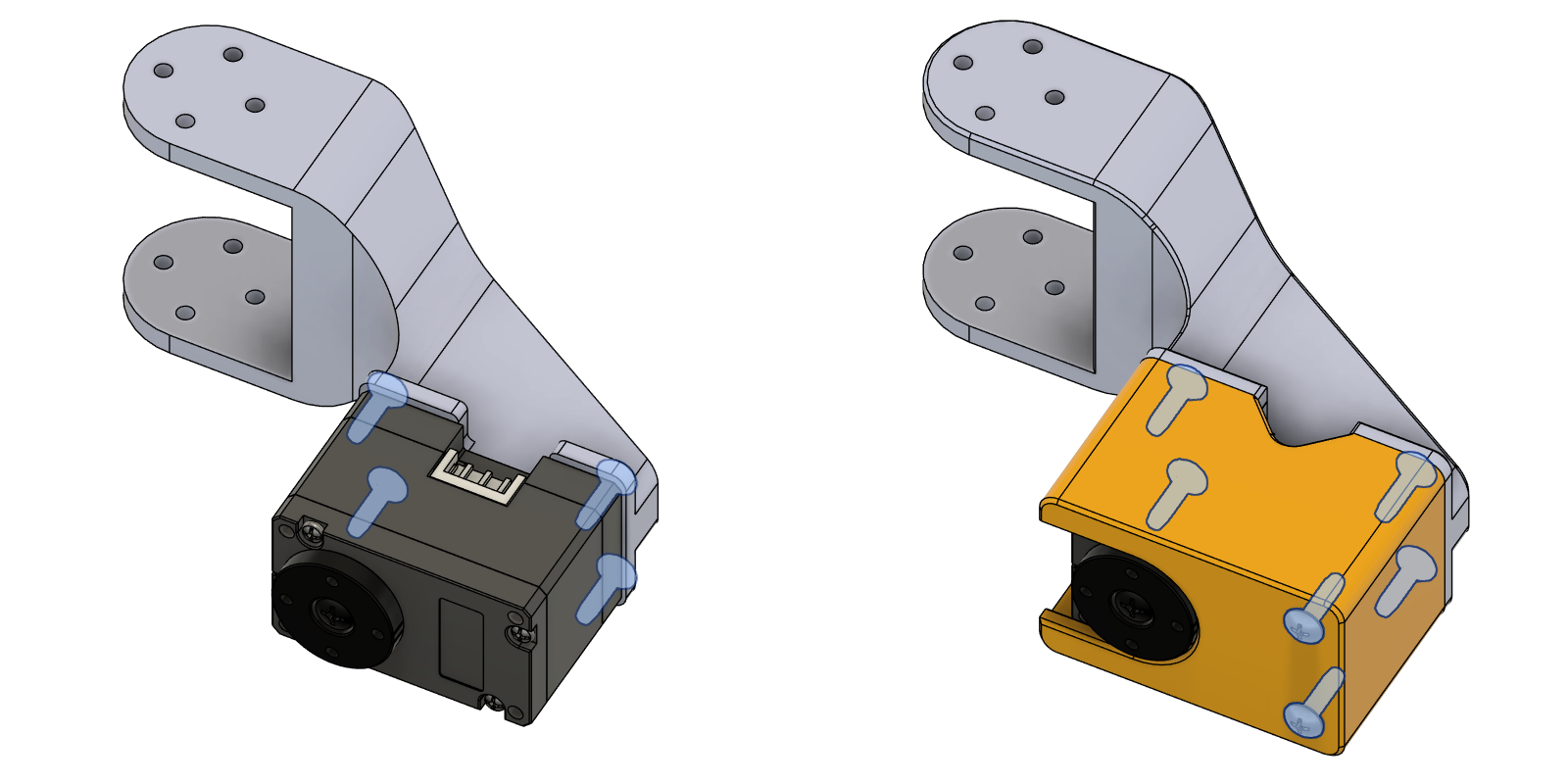
Durability via Servo Shields. Left: FACTR relies solely on screws threaded directly into the plastic servo casing, which easily tear out under human-applied torque. Right: DIRECT introduces an enclosure (orange) that physically clamps the servo on multiple sides and utilizes additional mounting screws. This physical barrier transfers structural loads to the enclosure itself, protecting the fragile servo threads from pull-out.
Repeatability of Calibration
Prior puppet-style controllers rely on a visually confirmed resting pose for calibration, which can drift between sessions and cause unstable gravity compensation. DIRECT introduces physical calibration fixtures that lock the device joints into a mechanical zero. As a result, the physical joint configuration at startup matches the zero pose defined in the URDF, providing consistent initial conditions across episodes.
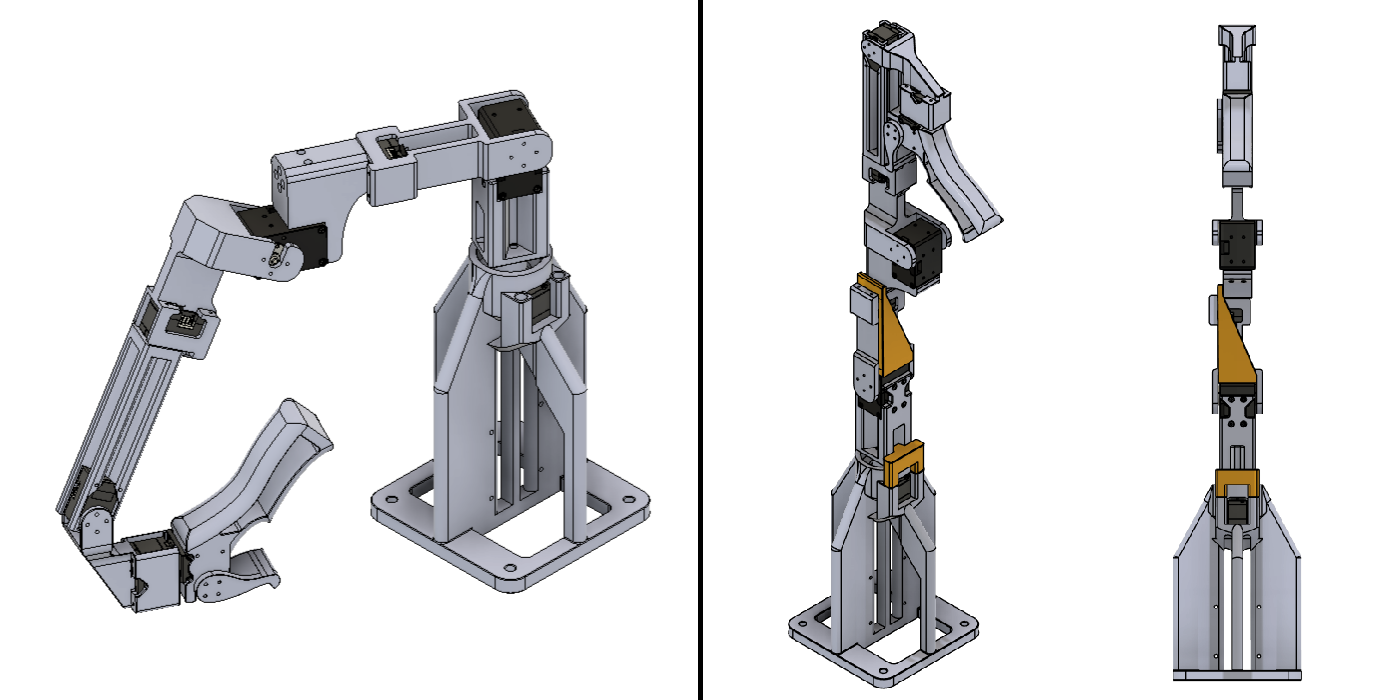
Repeatability of Calibration. Left: FACTR uses a visual resting pose for calibration. Right: DIRECT uses calibration fixtures (orange) that lock the joints into a mechanical zero, matching the URDF zero pose at every startup.
Ergonomics
Prior puppet-style controllers target seated operation, which limits operator comfort and reachable range during the standing workflow typical of DROID. DIRECT raises the base by 10 cm to extend the operator's reachable configuration space and introduces the Ergogrip, a contoured handle inspired by lever-action grips and GELLO, designed to improve ergonomics during extended standing sessions.
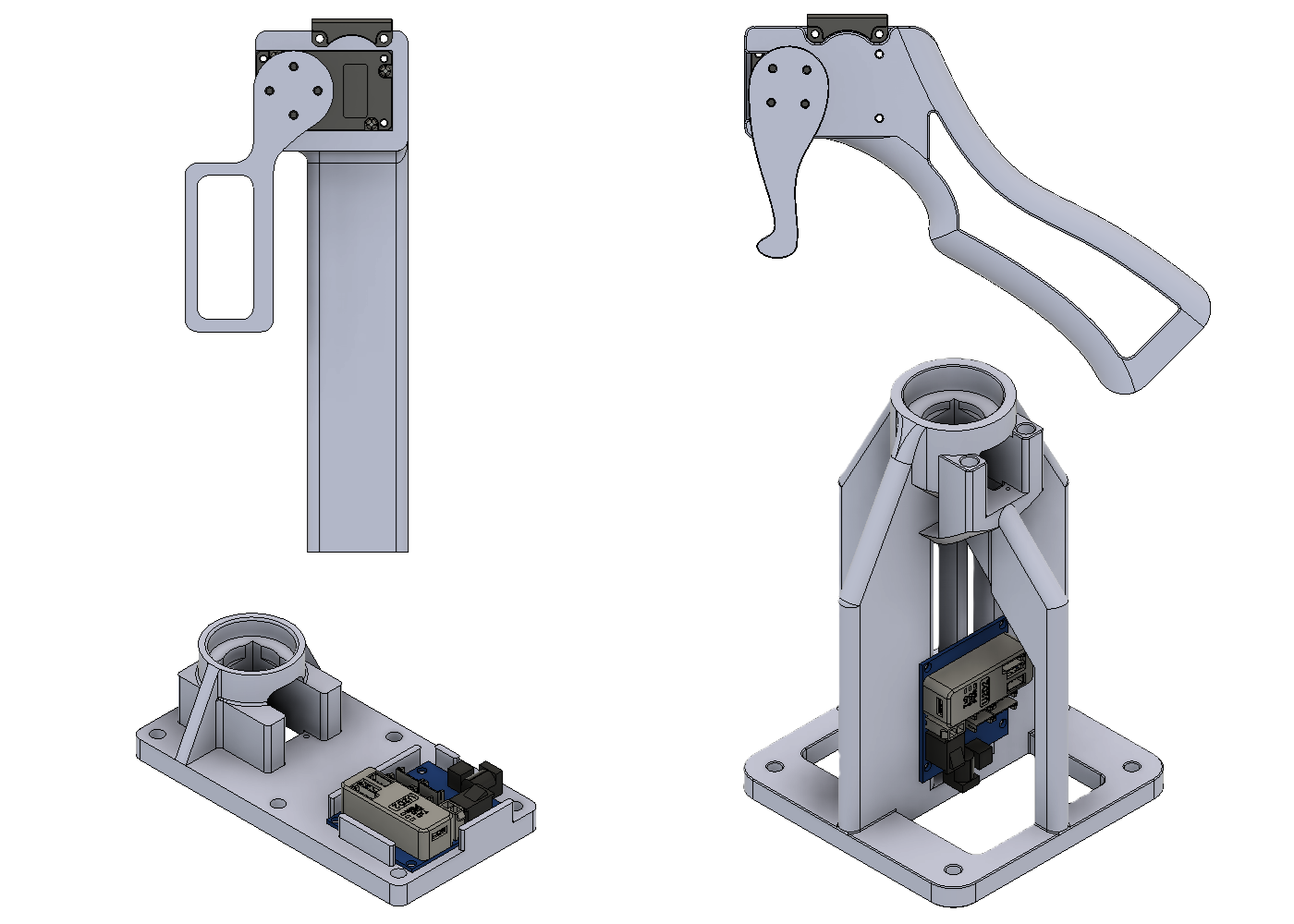
Operator Ergonomics. FACTR (left) versus DIRECT (ours, right). Top right: the Ergogrip provides a contoured handle shaped for standing, single-handed operation. Bottom right: the DIRECT base is elevated 10 cm to extend the operator's reachable configuration space.
Printability and Sourcing
All parts are designed for 3D printing in PETG rather than PLA for improved toughness and temperature resistance, further supporting durability under continuous use. We provide pre-configured print files with correct part orientations. The design also uses standard screws included with the servos and an off-the-shelf metric ball bearing.
